
关于最近Unity编辑器代码使用总结(三)
关于最近Unity编辑器代码使用总结(三)
前言
在写项目的过程中,我又遇到了一些关于Unity编辑器代码使用的问题。所以我再次开了一份新文章来记录我所遇到的问题。我是没想到这玩意还能到三的,不过我现在倒是觉得如果出四也正常了。毕竟只要还在做项目,问题总是有的。o(╥﹏╥)o
获取EditorWindow的位置和大小信息
EditorWindow中有一个变量名为position。如果只看名字你或许会以为这只是一个提供位置的Vector2或是Vector3类型的变量,但实际上他是一个Rect类型的变量。因此我们可以通过它来获取到EditorWindow的位置和大小信息。
个人认为这个变量的取名实在是很不好,如果开发者单纯想获取到编辑器窗口的大小,谁能想到一个'position'就涵盖了大小呢?
监听编辑器运行状态变换
有时候,我们需要游戏运行起来后,或是需要游戏结束后去开启部分功能。那么就可以使用EditorApplication.playModeStateChanged来监听编辑器运行状态变换。
居中显示
...

Delaunay三角剖分
Delaunay三角剖分
前言
最近的项目刚好用到了这个算法,但是我在网上找到的文章真的让我难以看懂。现在我好不容易理解了,那还是要写一篇文章记录一下,防止我忘了。
环境
windows11
Unity 2022.3.52f1c1
什么是Delaunay三角剖分
在几何中,三角剖分是指将平面对象细分为三角形,并且通过扩展将高维几何对象细分为三角形。对于一个给定的点集,有很多种三角剖分,其中“Delaunay三角剖分”就是其中一种。如果不理解的话,当做了解就好了。我认为重要的是它有什么样的性质和做用。我们知道了这些才能在开发中遇到对应问题时想起这个算法。下面的定义和性质我参考了三角剖分和德劳内三角形生成算法
Delaunay triangle generation algorithm。
定义
在数学和计算几何中,对于给定的平面中的离散点集 𝑃 ,其
Delaunay 三角剖分 DT(𝑃) 满足:
空圆性:DT(𝑃)是唯一的(任意四点不能共圆),在DT(𝑃)中,任意三角形的外接圆范围内不会有 ...
Earcut论文译文1
基于简化Earcut算法以确定性线性时间进行三角剖分
本文是翻译自《Deterministic Linear Time
ConstrainedTriangulation using Simplified
Earcut》。文中EarCut,我认为直接翻译成“耳切”有点怪,所以我保留了原文。
摘要
符合一组非相交输入片段的三角剖分算法通常以增量方式进行,首先插入点,然后插入线段。插入一个线段等同于:
(1)删除所有与它相交的三角形;
(2)使两个有着想要被删除线段作为共享边的多边形填充满因此而生成的空洞;
(3)分别对每个多边形进行三角剖分。
在这篇文章中,我们证明了凸顶点不是两个的多边形用Earcut方式生成三角形,不需要检查其他多边形点是否在每个Ear内部。事实上任何简单多边形都包含至少三个凸顶点,这就保证了存在一个有效的Ear用于切割,确保收敛。不仅如此,这就转化为一个最优的确定性线性时间三角剖分算法,而且这种算法也很容易实现。我们形式化地证明了我们的方法的正确性,并在实际应用中验证它,并与先前的研究进行比较。
1. 介绍
生成符合一组给定线段的三角化是许多科学 ...

随记2026-8-3
我想这篇文章应该在很早之前就应该写了。只是我一直在找理由拖延,所以才到现在才写。
本来这文章的标题应该叫做《贪》,我本意是想着贬低一下自己,顺带发泄一下。只是当我真的开始写的时候,我已经忘记了当初为什么要写下这样的标题。可能是秋天要到了,我变得有点多愁善感,开始写文就有很多零碎的想法复现脑中,索性就改为随记吧,记下我现在的想法。
我个人的博客定位早就从一开始的赚钱,到了个人的日常记述。每年一千多元的维护费用,的确也不算小了。但是为了自己有时候的装逼,我还是花了这笔钱。兜兜转转,我现在在博客上的花费也不少了。我如果不花这笔钱,我现在完全可以把这钱拿来置换好几个手办。不过,这大概率是不会发生的,这些钱最大的概率还是进我的肚子。不过,我倒也不怎么后悔,只是我今天看到账单的时候还是有点惊讶,也有点感慨。这时间不知不觉过了这么久,这钱不知不觉也花了这么多。
今年其实我也在努力写着文章,记录自己的学到知识。只不过到了5月份,我想写一篇关于水面渲染的文章。这真的是万恶的开始,我一下子卡住了。我个人实现的效果并不能让我自己满意。但是 ...

UnityUGUI镂空效果总结
UnityUGUI镂空效果总结
前言
果然只要在行业里足够长,重复的轮子总是要造的。最近刚好公司让我去新手引导,既然是新手引导,那么在UI上就需要一种镂空的效果。网上到是有着各种各样的方法,但是实现起来都有些复杂,甚至大多数都不符合我的项目需求。但是既然我都看了一遍,那就总结一下,顺便记录下我的自己的方案。
使用环境
Windows11
Unity 2022.3.52.f1c1
Universal RP 14.0.11
使用渲染模版造就镂空效果
网络很大一类方向就是这种使用渲染模版造就镂空效果,这种方案的原理和UGUI
Mask相似。不同的是Mask是掩盖,而这种方案是镂空。我并没有找到对应的实现,但是按照思路我自己做了一个,这也是我这次项目正在使用的方案。
自定义Mask + 自定义Image
阅读Mask源码后,我们可以发现,最重要的函数就是以下两个:IsRaycastLocationValid和GetModifiedMaterial。第一个是用来判断射线范围,第二个则是用来开进行材质修改 ...

MEIZU
从去年开始魅族就传出了停产的传闻,虽然官方几次都说是假新闻,但是今年还是确定了这个消息。天下没有不散的宴席,我早就知道这个道理,可当宴席真的散场的时候,我还是有些感伤。
寻路算法探讨
我想我可能很长的一段时间都不会在这上面继续研究了,因为我之后的项目大概率是用不上了。我想趁着现在我还记得,且仍然有兴趣,我想对迄今为止我所了解到的寻路算法做一个总结。同时这样也算是给自己之前的工作做整理。
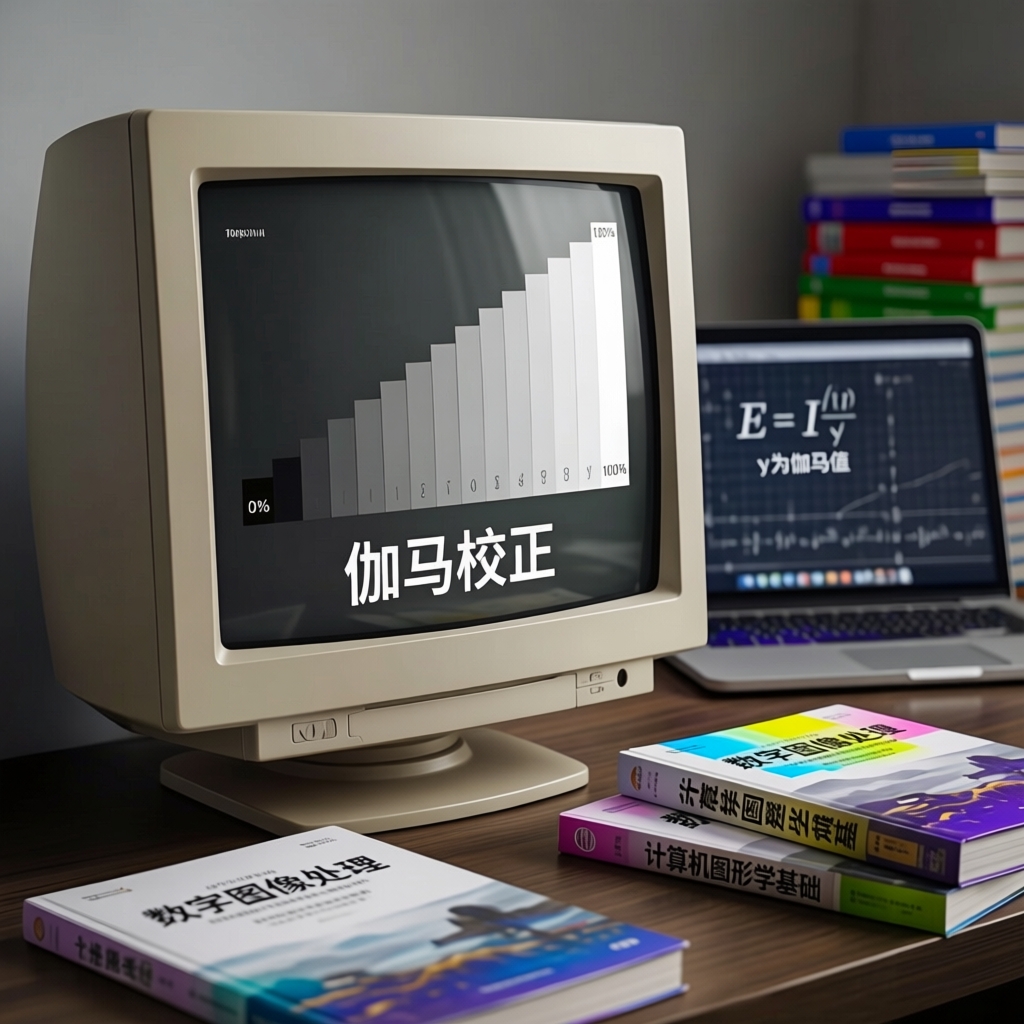
关于Gama矫正
伽玛校正(Gamma Correction),又称伽马非线性化(Gamma nonlinearity)或伽马编码(Gamma encoding),是影像系统中对光线辉度(luminance)或三色刺激值(tristimulus values)进行非线性运算的反运算方法,主要用于调整图像的非线性色调。伽玛校正通过优化数据位分配补偿人类视觉特性,确保敏感亮度区间的信息存储效率。其应用涵盖灰度计算领域。

2026年的展望
2026年的展望
2025的目标,我竟然没有写一篇文章来记录。至于原因我到是忘了,不过这不重要。“悟已往之不谏,知来者犹可追”,今年的展望还是要写的。
反正都是立Flag,那就直接给出目标。
把自己的身上的病养好
看完《西方哲学简史》
现在的公司如果新品类仍然没什么意思就跳
无论怎么样今年要换租房子了
开始学习视频制作
努力达到之前的目标,把对应的奖励拿满
学完乐理
如果有薪水上的增长,那就学一下绘画

2025年终总结
2025年终总结
正文
我有一段时间没有写随记了。正好蹭着年末,我就写一篇关于我的2025吧,算是又一篇流水账吧。
本来我是觉得,我的2025和以前也没什么两样,但是仔细回忆起来还是有不一样的。在今年我和好久没联系的高中的同学一起游玩了一番。我尝试了所谓的相亲,这和我之前想象的完全不一样。我因为胃病频繁去医院,终于有了一点效果,至少现在我的并不会那么容易肚子疼了。不过,因为我年初想健身,今年也是得了不少关节上的病症,比如我的膝盖时不时的发痛,我手腕上多了一个囊肿,我肩关节也开始嘎嘎作响。因此虽然我在年初定了想要健身的目标,但实际上我健身的次数不多。今年最不好的消息就是我得了重度脂肪肝。或许是因为我长期熬夜的原因,又或者是我这几年的“口无遮拦”(暴饮暴食),导致了我现在得了重度脂肪肝。幸好听医生的描述只要我改变生活作息和饮食,我这病就能好。但是我皮肤病只能再拖延下去了。
大体而言,2025能让我回忆起来的事情也就这些了。虽然事情不多,但是我也从中获取到了一些感悟。(希望这些感悟能激励我久一点)
自从离开海牛后,我越 ...